
Gazebo のチュートリアルをかじった
仕事でロボット系のシミュレーションが必要になるかもしれないってことで Gazebo のチュートリアルをちょっとだけやってみた。
とりあえず Moving the Robot まで進めた。
環境
- Linux Mint 22.1 (ubuntu 22.04)
- gazeob ionic
Gazebo 自身は、公式の手順で apt install gz-ionic でインストールした。
Gazebo のチュートリアルを Moving the Robot まで進めると building_robot.sdf はこうなった。
各章の冒頭に完成形があるのでそれをみればいい。
<?xml version="1.0" ?>
<sdf version="1.10">
<world name="Moving_robot">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="gz-sim-physics-system"
name="gz::sim::systems::Physics">
</plugin>
<plugin
filename="gz-sim-user-commands-system"
name="gz::sim::systems:aze:UserCommands">
</plugin>
<plugin
filename="gz-sim-scene-broadcaster-system"
name="gz::sim::systems::SceneBroadcaster">
</plugin>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose> <!--the pose is relative to the world by default-->
<link name='chassis'>
<pose relative_to='__model__'>0.5 0 0.4 0 0 0</pose>
<inertial> <!--inertial properties of the link mass, inertia matix-->
<mass>1.14395</mass>
<inertia>
<ixx>0.126164</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.416519</iyy>
<iyz>0</iyz>
<izz>0.481014</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<box>
<size>2.0 1.0 0.5</size> <!--question: this size is in meter-->
</box>
</geometry>
<!--let's add color to our link-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>
<collision name='collision'> <!--todo: describe why we need the collision-->
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
</collision>
</link>
<!--let's build the left wheel-->
<link name='left_wheel'>
<pose relative_to="chassis">-0.5 0.6 0 -1.5707 0 0</pose> <!--angles are in radian-->
<inertial>
<mass>2</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
<!--copy and paste for right wheel but change position-->
<link name='right_wheel'>
<pose relative_to="chassis">-0.5 -0.6 0 -1.5707 0 0</pose> <!--angles are in radian-->
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
<frame name="caster_frame" attached_to='chassis'>
<pose>0.8 0 -0.2 0 0 0</pose>
</frame>
<!--caster wheel-->
<link name='caster'>
<pose relative_to='caster_frame'/>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.016</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.016</iyy>
<iyz>0</iyz>
<izz>0.016</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>
<!--connecting these links together using joints-->
<joint name='left_wheel_joint' type='revolute'> <!--continous joint is not supported yet-->
<pose relative_to='left_wheel'/>
<parent>chassis</parent>
<child>left_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz> <!--can be defined as any frame or even arbitrary frames-->
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>
<joint name='right_wheel_joint' type='revolute'>
<pose relative_to='right_wheel'/>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>
<!--different type of joints ball joint--> <!--defult value is the child-->
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>
<!--diff drive plugin-->
<plugin
filename="gz-sim-diff-drive-system"
name="gz::sim::systems::DiffDrive">
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<wheel_separation>1.2</wheel_separation>
<wheel_radius>0.4</wheel_radius>
<odom_publish_frequency>1</odom_publish_frequency>
<topic>cmd_vel</topic>
</plugin>
</model>
<!-- Moving Left-->
<plugin filename="gz-sim-triggered-publisher-system"
name="gz::sim::systems::TriggeredPublisher">
<input type="gz.msgs.Int32" topic="/keyboard/keypress">
<match field="data">16777234</match>
</input>
<output type="gz.msgs.Twist" topic="/cmd_vel">
linear: {x: 0.0}, angular: {z: 0.5}
</output>
</plugin>
<!-- Moving Forward-->
<plugin filename="gz-sim-triggered-publisher-system"
name="gz::sim::systems::TriggeredPublisher">
<input type="gz.msgs.Int32" topic="/keyboard/keypress">
<match field="data">16777235</match>
</input>
<output type="gz.msgs.Twist" topic="/cmd_vel">
linear: {x: 0.5}, angular: {z: 0.0}
</output>
</plugin>
<!-- Moving Right-->
<plugin filename="gz-sim-triggered-publisher-system"
name="gz::sim::systems::TriggeredPublisher">
<input type="gz.msgs.Int32" topic="/keyboard/keypress">
<match field="data">16777236</match>
</input>
<output type="gz.msgs.Twist" topic="/cmd_vel">
linear: {x: 0.0}, angular: {z: -0.5}
</output>
</plugin>
<!-- Moving Backward-->
<plugin filename="gz-sim-triggered-publisher-system"
name="gz::sim::systems::TriggeredPublisher">
<input type="gz.msgs.Int32" topic="/keyboard/keypress">
<match field="data">16777237</match>
</input>
<output type="gz.msgs.Twist" topic="/cmd_vel">
linear: {x: -0.5}, angular: {z: 0.0}
</output>
</plugin>
</world>
</sdf>
起動するには、ターミナルを2つ起動する必要がある。
1つめは、sdf ファイルを読み込んで画面を表示する
$ gz sim building_robot.sdfもう一つは、入力されたキーをターミナルにダンプするものなので本当は動かさなくてもいい。
$ gz topic -e -t /keyboard/keypressそして GUI で Keyboard Publisher を起動する必要がある。
GUI でプラグインを起動するには、右上のメニューアイコンで 『Key Publisher』 を選択する。
これを読み飛ばしてしばらく考え込んでしまった。
そして左下の 再生ボタン? 開始ボタンをクリックする。
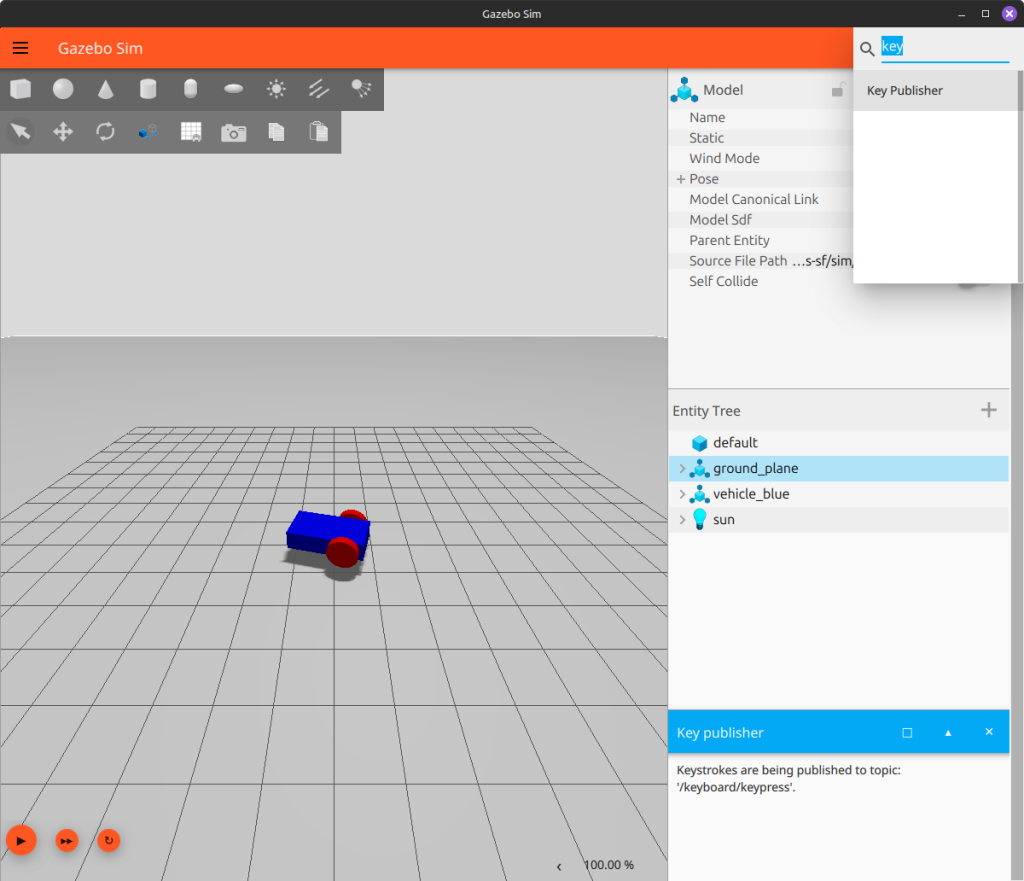
するとキーボードの操作で車?が動作するようになる。
参考
Moving the robot — Gazebo ionic documentation
gazeboとROS2を連携してロボットを操作する #Gazebo – Qiita
Views: 1